









Т»Ўў ёЕКц
ёГПөНіДвІЙУГ100MёЯЛЩКөКұТФМ«НшPowerlinkКөПЦ¶Ф2МЁЈЁ4МЁЈ©өз»ъөДРӯөчҝШЦЖЈ¬К№¶аМЁөз»ъ№ІН¬Зэ¶ҜТ»ёцёәФШЈ¬НкіЙБҰҫШөД·ЦөЈәНҙ«¶ҜјдП¶өДјхРЎ»тПыіэЈ¬ҝЙТФУРР§МбёЯПөНіөДёъЧЩҫ«¶ИЎЈОӘКөПЦҪПёЯөДёъЧЩҫ«¶ИЈ¬ёГПөНіІЙУГО»ЦГЛ«·ҙАЎ·ҪКҪЈ¬УЙЛЕ·юЗэ¶ҜЖчЦұҪУКөПЦМмПЯ·ҪО»ј°ё©СцҪЗ¶И·ҙАЎЈ¬НкіЙ¶ФДҝұкО»ЦГөДёЯЛЩКөКұ¶ЁО»УлёъЧЩЎЈ
ҙЛНвЈ¬ХыёцёъЧЩЛЕ·юПөНіЕдұёТ»МЧУГУЪЛЕ·юО»ЦГҪвЛгј°ACUЙПО»»ъәҪјЈО»ЦГГьБоҙҰАнФЛЛгөДҝЙұаіМјЖЛг»ъҝШЦЖЖчPCCЈ¬ёГҝШЦЖЖчЧчОӘХыёцЛЕ·юПөНіөДЦчҝШөҘФӘЈ¬ҫЯУРәЬЗҝөДФЛЛгҙҰАнДЬБҰЈ¬УлЙПО»»ъІЙУГ100MёЯЛЩТФМ«НшНЁРЕЈ¬ұЈЦӨБЛЙПО»»ъёш¶ЁКэҫЭөДНЁРЕҙшҝнЈ¬ОӘХыёцПөНіөДКөКұёъЧЩҫ«¶ИМṩБЛ»щҙЎұЈЦӨЎЈ
¶юЎў№ҰДЬјјКхЦёұк
№ҰДЬЈә
1Ўў100MКөКұТФМ«НшөДЛЕ·юЗэ¶ҜЖчУлPCCҝШЦЖЖчЧйНш
2Ўў¶аөз»ъРӯөчҝШЦЖЈ¬ЧФ¶ҜРӯөчёәФШУлЛЩ¶ИН¬ІҪЈ»
3ЎўКэЧЦЛЩ¶ИөчҪЪЖчЎўБҰҫШ·ЦЕдЎўІоЛЩТЦЦЖЎў»·В·ҝШЦЖ
4ЎўУлACUјдөДИ«КэЧЦҪУҝЪ
5ЎўУлACUјдөДҝШЦЖЦёБоЎўЛЩ¶ИЦёБоЎўЧҙМ¬РЕПўөДЛ«Птҙ«Кд
6ЎўКөКұМбИЎҙуЕМЈЁ·ҪО»Ўўё©СцЈ©өДЛЩ¶ИЎўО»ЦГРЕПўЈ¬КөПЦҙуЕМЛЩ¶ИЎўО»ЦГҝШЦЖ
7ЎўНЁ№э¶ФЛЕ·юөз»ъКдіцБҰҫШөДЖ«ЦГёЙФӨЈ¬ҝЙҝҝКөПЦҙуЕМФЛ¶ҜөДЎ°ПыП¶ЎұТӘЗу
јјКхЦёұкЈә
1Ўў№©өзөзФҙЈә ¶ҜБҰөзФҙЈә380VACЎА10%
ёЁЦъөзФҙЈә24VDCЎА25%
2ЎўНЁС¶ҪУҝЪЈә
1Ј©УлACUНЁРЕЈә100MТФМ«Нш
2Ј©УлЛЕ·юЗэ¶ҜЖчНЁРЕЈә100MКөКұТФМ«НшPowerlink
3Ј©УлPDUНЁРЕЈәSSIЈЁ18О»Ј©
3ЎўёъЧЩҫ«¶ИЈәЧоёЯ0.002ЎгЈЁ0.04mradЈ©Ј¬Ў°№э¶ҘЎұ0.05ЎгЈЁ0.1mradЈ©
4Ўў»·ҫіМхјюЈә
1Ј©ҙўҙжОВ¶ИЈә-50ЎжЎ«
2Ј©№ӨЧчОВ¶ИЈә-40ЎжЎ«60Ўж
3Ј©Па¶ФКӘ¶ИЈә98%ЈЁ
4Ј©Иэ·АТӘЗуЈәҫЯУРФЪСШәЈЗшУтөД·АіұЎў·АКӘИИЎў·АСООнДЬБҰ
5Ј©өзҙЕјжИЭЈә°ҙGJB151
ИэЎўКөК©·Ҫ°ё
1ЎўЙијЖЦёөјЛјПл
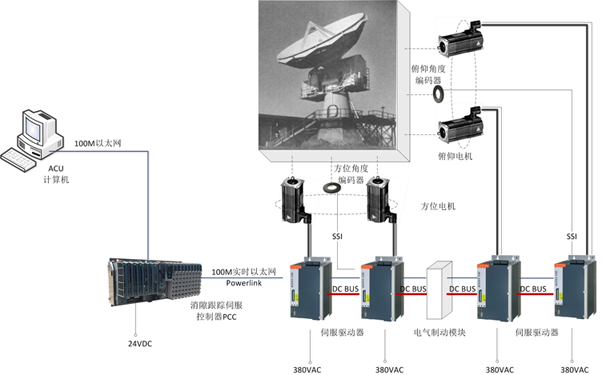
ұҫПөНіөДЙијЖІЙУГҝЙұаіМјЖЛг»ъҝШЦЖЖчPCCЧчОӘ¶аөз»ъҝШЦЖЖчөДЦчҝШІҝјюЈ¬КөПЦ¶аёцөз»ъөДРӯөчҝШЦЖ№ІН¬Зэ¶ҜТ»ёцёәФШЎЈҝЙұаіМјЖЛг»ъҝШЦЖЖчPCCЛщМṩөД·бё»¶аСщөДҪУҝЪДЈҝйЎўёЯЛЩҝЙҝҝөДФЛЛгҙҰАнДЬБҰј°КөКұТФМ«НшPowerlinkөДФ¶іМА©Х№№ҰДЬЈ¬ҝЙТФҪ«ЛДМЁ·ҪО»Ўўё©Сцөз»ъЧйіЙТ»ёц№ІН¬өДНшВзЈ¬ҙУ¶шНЁ№эТ»МЧPCCКөПЦ¶ФЛыГЗФЪКдіцБҰҫШЈ¬ЛЩ¶ИәНО»ЦГЙПөДёҙәПҝШЦЖЎЈҙЛНвЈ¬МмПЯҝШЦЖөҘФӘЈЁACUЈ©әНPLCҝШұЈ»ШВ·ТІҝЙёщҫЭТӘЗуЈ¬·ЦұрСЎУГЛщРиөДНшВзҪйЦКЈ¬ИзТФМ«НшЈ¬RS422Ј¬CANөИЈ¬ҪУИлұҫПөНіөДЦчҝШөҘФӘЎӘPCCМмЛЕҝШЦЖЖчЦРЎЈPCCәНМмПЯҝШЦЖөҘФӘЈЁACUЈ©ҪшРРЛЩ¶ИЦёБоЎўҝШЦЖЦёБоәНЧҙМ¬РЕПўөДКөКұКэҫЭҙ«КдҪ»»»Ј»УлPLCҝШұЈ»ШВ·ТаҝЙҪшРРРЕПўөДКөКұҪ»»»Ј¬ҙУ¶шКөПЦұҫҝШЎўФ¶ҝШІЩЧчәН°ІИ«ҝШұЈЎЈ
Зэ¶Ҝ·ҪО»Ўўё©СцөДЛЕ·юөз»ъҝШЦЖЖчСЎУГ100MКөКұ№ӨТөТФМ«НшPowerlinkЧйНшЈ¬Ҫ»УЙPCCҝШЦЖЈ¬ОТГЗід·ЦАыУГPCCЗҝҙуөДҙҰАнЖчУІјюөДёЯЛЩФЛЛгҙҰАнДЬБҰәН¶аИООсКөКұІЩЧчПөНіИнјюЈ¬ТФј°PowerlinkөДёЯЛЩКөКұМШРФЈ¬¶ФЛЕ·юЗэ¶ҜЖчөДО»ЦГ»·ҝЙҪЁБўЧоёЯ200usј¶КэҫЭЛўРВВКЎЈХвР©ОЮТЙОӘұҫПөНі¶аөз»ъБҰҫШөДҫщәв·ЦЕдЎўҙ«¶ҜјдП¶өДјхРЎ»тПыіэТФј°ДҝұкөДёъЧЩУл¶ЁО»өм¶ЁБЛЗҝҙуөД»щҙЎ
ұҫЛЕ·юПөНіНЁ№эёЯЛЩSSIН¬ІҪҙ®РРҪУҝЪ»сИЎPDUөД·ҪО»Ўўё©СцҙуЕМөДМмПЯҪЗ¶ИКэҫЭЈ¬ёГКэҫЭЦұҪУ·ҙАЎөҪЛЕ·юЗэ¶ҜЖчACOPOSЙПЈ¬І»ҪцҪЪКЎБЛКэҫЭҫӯУЙЙПО»»ъACU»тPCCөДЧӘ·ўКұјдЈ¬ЗТПыіэБЛёГКэҫЭУЙЙПО»»ъҙҰАнөДјЖЛгОуІоЈ¬Чоҙу»ҜөД·ў»УБЛПөНіөДҙ«¶ҜәНҝШЦЖҫ«¶ИЎЈ
2ЎўҝШЦЖПөНіҪб№№ҝтНј


 ұё°ёәЕЈә
ұё°ёәЕЈә
